High Fidelity Video Prediction with Large Stochastic Recurrent Neural Networks
Villegas et al., 2019
 Source: Villegas et al., 2019
Source: Villegas et al., 2019Summary
- Addresses whether specialize architectures are needed for video prediction
- Investigates the performance of video prediction model as network capacity increases
- Demonstrates that scaling up model size improves prediction accuracy
- Links: [ website ] [ pdf ]
Background
- Learning accurate predictive models of the (visual) world remains a crucial, yet challenging, problem
- Some prior work towards solving this problem use multi-modal sensory streams, specialized computations (e.g. optical flow), or additional high-level information (e.g. landmarks, segmentations)
- Increasing model capacity has commonly been shown to improve performance across various domains
- Possibly because it better leverages the benefits of learning
Methods
- Use Stochastic Video Generation (SVG) as base architecture, since it only uses standard neural network layers
- Change encoder-decoder to only have convolutional layers for more detailed reconstruction since bottleneck is larger
- Use convolutional LSTM instead of fully-connected LSTM
- Use $l_1$ loss instead of $l_2$ for sharper frame prediction
- Scale up number of neurons in encoder-decoder by factor of $K$ and LSTM by factor of $M$
- $M_{max}=3$, $K_{max}=5$
Results
- Baselines:
- LSTM: remove stocahstic component
- CNN: remove stocahstic component and LSTM component
- Datasets:
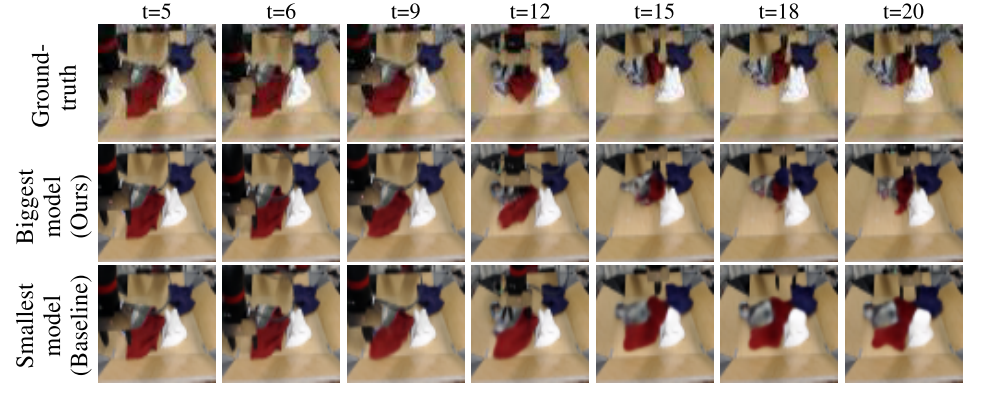
- Action-conditioned towel pick: robot arm is interacting with towels
- Human 3.6M: humans performing actions inside a room (e.g. walking, sitting)
- KITTI: driving dataset with partial observability
- Metrics:
- Frame-wise:
- Peak Signal-to-Noise (PSNR): measures exact pixel match
- Structural Similarity (SSIM): measures exact pixel match
- VGG Cosine Similarity: measures perceptual similarity based on similarity of VGG features
- Dyanimcs-based:
- Frechet Video Distance (FVD): compares quality of generated videos to ground-truth videos using features from video classification network
- Amazon Mechanical Turk (AMT): humans asked which of two videos were more realistic or if they looked about the same
- Frame-wise:
- Results summary:
- Largest SVG model performs best with FVD for Towel pick and Human 3.6M, while largest LSTM performs slightly better for KITTI
- Performance incresases with model capacity for all models (SVG, LSTM, CNN)
- CNN, without recurrence, does poorly overall
- Humans prefer predictions from larger models, but it also seems like LSTM predictions are more realistic than SVG
- SVG and LSTM perform similarly based on frame-wise metrics, with SVG slightly outperforming for longer rollouts
Conclusion
- Verifies the intuition and general trend that larger capacity networks perform better, given sufficient training data
- Possible to improve even more by training on higher resolution images
- While they compare to ablations it would have been interesting to see how architectures with additional inductive biases compare, especially with respect to number of parameters
- The poor performance without recurrence might motivate the use of object-centric dynamics models, which seem to perform reasonably without recurrence